
Various motors are required, including well-known stepper motors and servo motors. However, for many users, they do not understand the main difference between these two motors, so they still do not know how to choose. So, what are the main differences between stepper motors and servo motors?
? basic structure
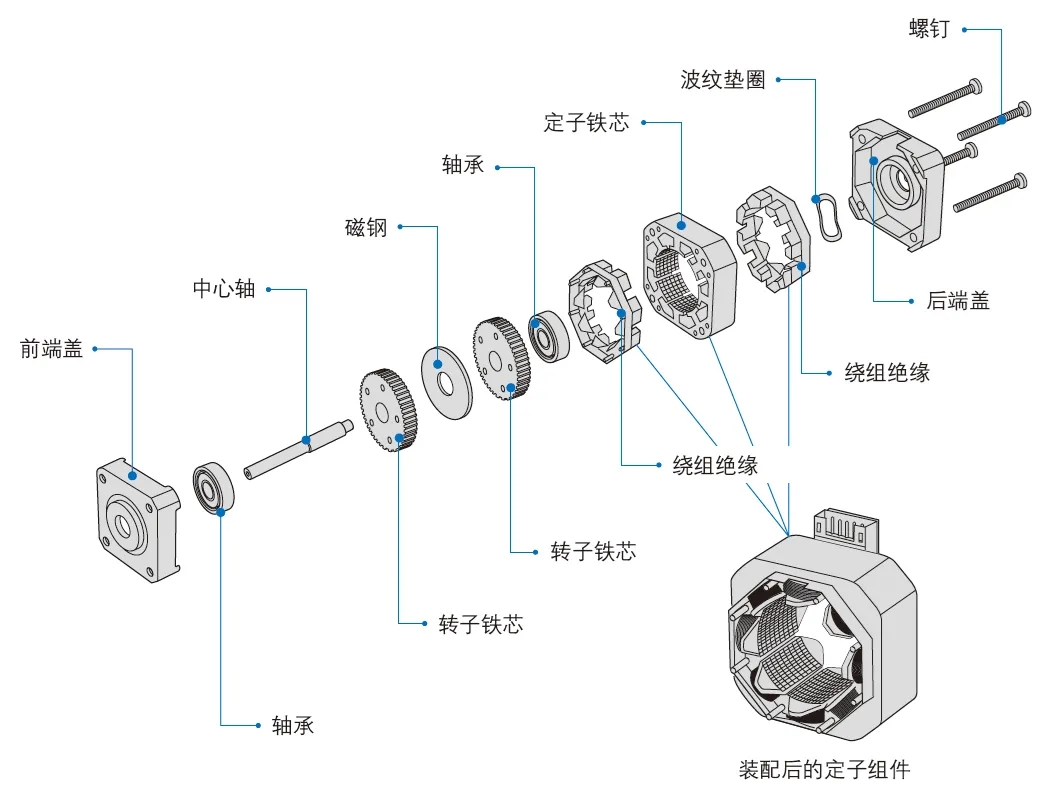
Stepper motor structure diagram (picture source: MOONS’)
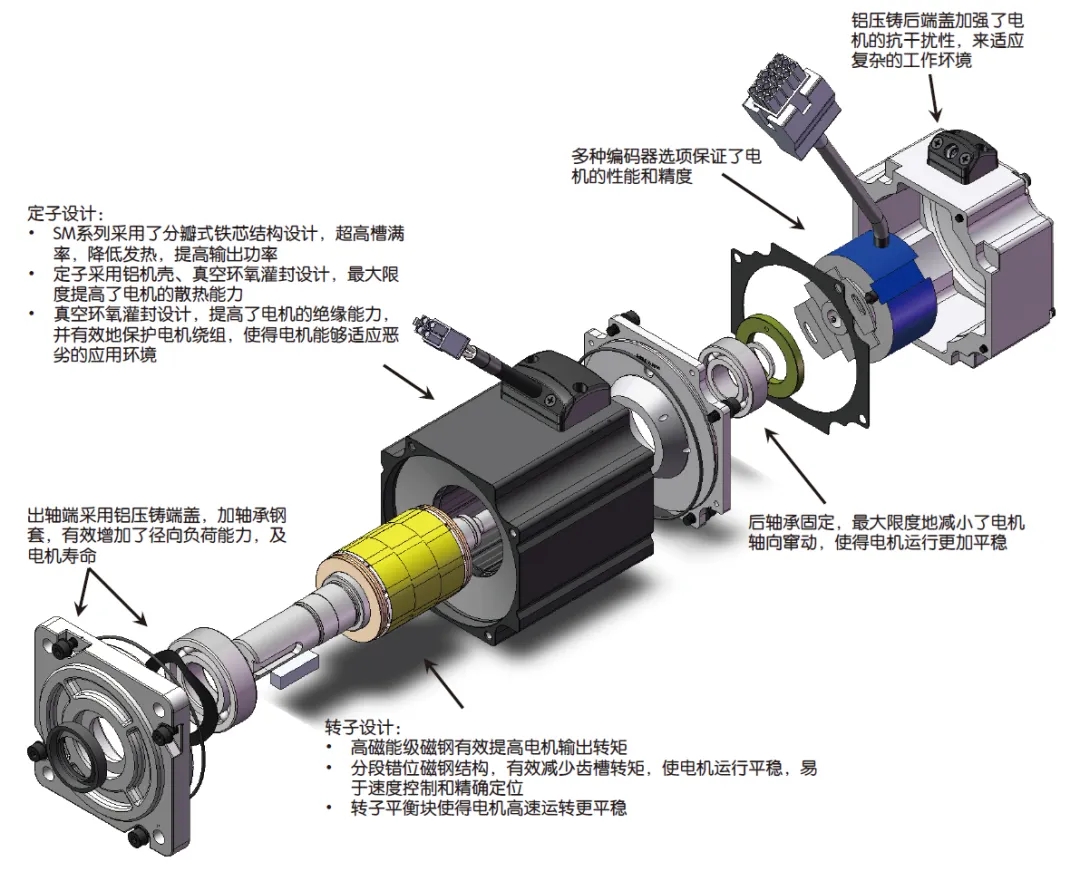
Servo motor structure diagram (picture source: MOONS’)
The following briefly describes their differences:

1. Working principle
The two kinds of motors are very different in principle. The stepper motor is an open-loop control element stepping motor that converts the electrical pulse signal into an angular displacement or a linear displacement. Check the working principle of the stepper motor.
The servo mainly relies on pulses for positioning. The servo motor itself has the function of sending pulses, so every time the servo motor rotates one angle, it will send out a corresponding number of pulses. In this way, it echoes the pulse received by the servo motor, or is called a closed loop. It will be clear how many pulses have been sent and how many pulses have been received back, so that the rotation of the motor can be precisely controlled to achieve precise positioning.
2. Control accuracy
The accuracy of a stepping motor is generally achieved by precise control of the step angle. There are many different subdivision gears for the step angle to achieve precise control.
The control accuracy of the servo motor is guaranteed by the rotary encoder at the back of the motor shaft. Generally, the control accuracy of the servo motor is higher than that of a stepper motor.
3. Speed and overload capacity
Stepper motors are prone to low-frequency vibration when they are running at low speeds, so when stepping motors are working at low speeds, damping techniques are usually used to overcome low-frequency vibration phenomena, such as adding a damper to the motor or using subdivision technology on the driver. , And the servo motor does not have this phenomenon. Its closed-loop control characteristics determine that it maintains excellent performance at high speeds. The torque-frequency characteristics of the two are different. Generally, the rated speed of a servo motor is greater than that of a stepper motor.
The output torque of the stepper motor will decrease with the increase of the speed, while the servo motor has a constant torque output. Therefore, the stepper motor generally has no overload capacity, while the AC servo motor has a stronger overload capacity.
4. Operating performance
Stepper motors are generally open-loop control. When the starting frequency is too high or the load is too large, it will lose step or stall. Therefore, you need to deal with the speed problem or increase the encoder closed-loop control to see what is the closed-loop step. Into the motor. The servo motor adopts closed-loop control, which is easier to control, and there is no loss of synchronization.
5. Cost
Stepping motors have advantages in terms of cost performance. The price of servo motors is higher than that of stepping motors of the same power to achieve the same function. The advantages of high response, high speed and high precision of servo motors determine the high price of products , This is inevitable.
In summary, there are big differences between stepper motors and servo motors in terms of working principle, control accuracy, overload capacity, operating performance and cost. However, both have their own advantages. If users want to choose from them, they need to combine their actual needs and application scenarios.
- Previous Article : No Record
- Next Article : Compared with AC asynchronous motors, what are the advantages of permanent magn...
